To use the GPS time dissemination service, one must track one GPS satellite (if in a
precisely known location), or four GPS satellites (if in an unknown location). The
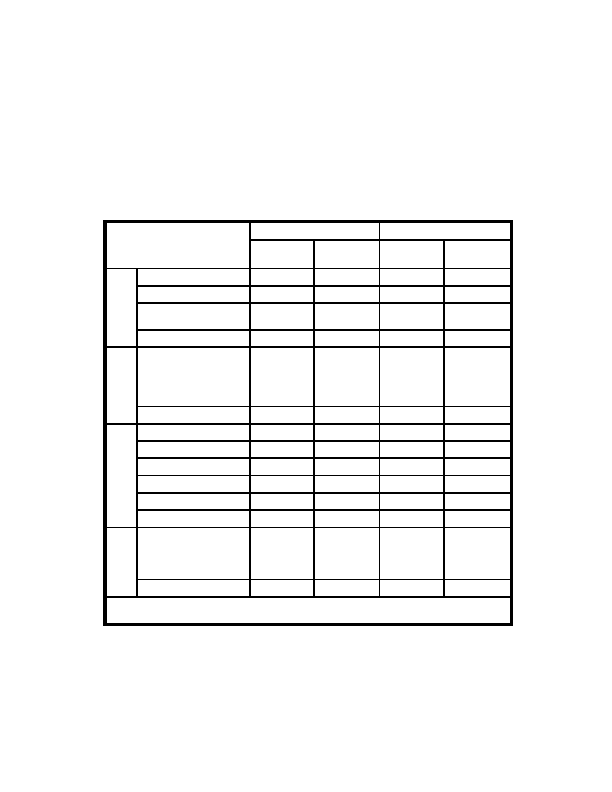
absolute UTC accuracies that the user can expect are presented in Table 11 2 and
depend predominately on the following:
How accurately the receiver antenna p osition is known (if tracking 1
satellite)
Whether a C/A or P(Y) code receiver is used
Whether the user can "smooth" the measurements or has to use "raw"
data.
Table 11 2. Coordinated Time Transfer Using GPS PPS Receivers
C/A Code
P(Y) Code
Raw
Smoothed
Raw
Smoothed
Error Source
Measurements Measurements Measurements Measurements
(ns, 95%)
(ns, 95%)
(ns, 95%)
(ns, 95%)
Frequency Standard Stability
0
0
0
0
S
P
D Band Delay Variation
0
0
0
0
A
Space Vehicle Acceleration
C
Uncertainty
0
0
0
0
E
Other
0
0
0
0
C
O
Ephemeris Prediction Model
N
Implementation
T
0
0
0
0
R
O
L
Other
0
0
0
0
Ionospheric Delay
0 65
0 65
0 15
0 15
Tropospheric Delay
0 13
0 13
0 13
0 13
U
Receiver Noise
58
10
58
10
S
E
Multipath
8
8
8
8
R
Other
3
3
3
3
Position Error
144
144
144
144
T
E
O
R
Position Unknown
155 169
145 146
155 157
145 146
T
R
A
O
L
R
Position Known
59 88
13 24
59 62
13 24
The values in the table are based on Table 3 1 "GPS System Error Budget" and the smoothing of the measurements
is estimated to reduce the receiver noise by a factor of 6.
11.4.4.1 Precise Time Dissemination Under Dynamic Conditions
Precise time accuracy degrades under dynamic conditions for two main reasons:
1.
Temporary changes in the GPS receiver clock rate due to g sensitivity
11 12
<< < GO > >>