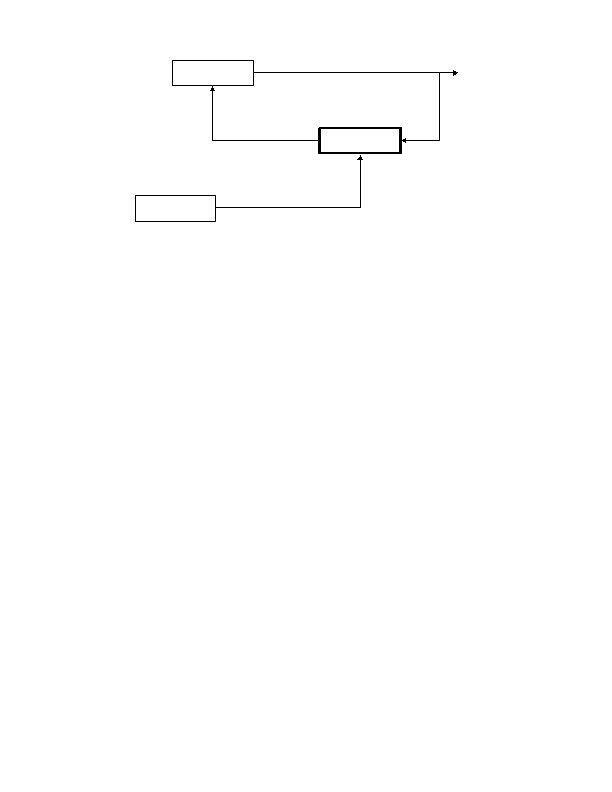
CORRECTED POSITION,
VELOCITY AND ATTITUDE
INS
CORRECTIONS FOR INS
POSITION, VELOCITY
AND ATTITUDE ERRORS
GPS/INS
KALMAN FILTER
GPS PR AND dPR
MEASUREMENTS
GPS RCVR
Figure 9 6. Closed loop Integrated GPS/INS Architecture
9.4.2.2 The INS Navigation Process
The INS Kalman filter will model and estimate some of the INS errors. An INS
consists of, as a minimum, an Inertial Measurement Unit (IMU) and a computer to
perform processing. The inertial sensors are accelerometers and gyroscopes which
measure, loosely speaking, inertial accelerations and rotations.
Most IMU s fall into one of two classes. The first, and oldest type, is a gimballed
platform. In a gimballed IMU, the accelerometer triad is mounted on a platform that
is maintained stable in inertial space by the gyros. A locally level navigation frame
is usually mechanized so that the gyros are "torqued" for transport and earth rates
to force the platform to remain perpendicular to the local gravity vector. Thus the
accelerometers measure accelerations directly in the local level plane. Many
gimballed platforms also include a third accelerometer orthogonal to the two in the
platform plane that measures vertical specific force. The attitude of the IMU case
with respect to the platform is determined through electrical pickoffs of the gimbal
structure.
The second type of IMU is the strapdown system. In a strapdown IMU, the gyros are
rate integrating and are essentially hard mounted to the host vehicle. The gyros
measure incremental angular change. The computer must keep track of the angular
changes so that the attitude of the host vehicle can be determined. The three
accelerometers measure linear accelerations as in the case of a gimballed IMU,
although the accelerations are in the vehicle body frame. The transformation from
the platform to navigation frames is used to convert the accelerations to navigation
coordinates where they are integrated to produce velocity and position.
9 14
<< < GO > >>