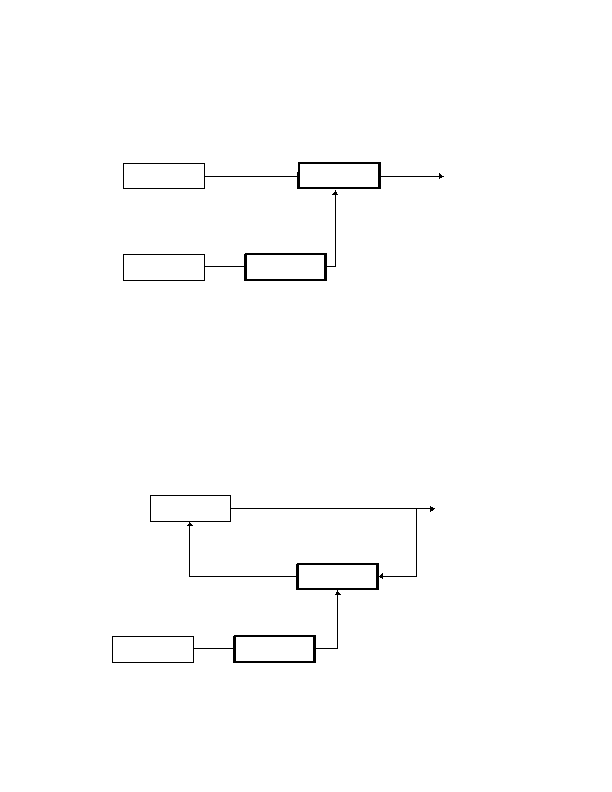
The simplest way to combine GPS and INS is a reset only mechanization in which
GPS is used to periodically reset the INS solution (see Figure 9 3). In this loosely
coupled, open loop strategy the INS is not recalibrated by GPS data, so the
underlying error sources in the INS still drive its navigation errors as soon as GPS
resets are interrupted. However, for short GPS interruptions or for high quality INS,
the error growth may be small enough to meet mission requirements.
INS UNCORRECTED
POSITION, VELOCITY
CORRECTED POSITION,
AND ATTITUDE
VELOCITY AND ATTITUDE
INS
INS
KALMAN FILTER
GPS POSITION
AND VELOCITY
GPS
GPS RCVR
KALMAN FILTER
Figure 9 3. Open loop GPS/INS Aided Architecture
The main advantage of GPS aiding the INS in a closed loop mechanization is that
the inertial system is continuously calibrated by the Kalman filter, using the GPS
observables (see Figure 9 4). When GPS is lost due to jamming, dynamics or
satellite shadowing, the inertial system can continue to derive its navigation
solution, but now with a greater degree of precision by virtue of its recent
calibration. However, this loosely coupled, closed loop technique has serious
potential stability problems in cases where the INS feeds back navigation data to
the GPS receiver.
CORRECTED POSITION,
VELOCITY AND ATTITUDE
INS
CORRECTIONS FOR INS
POSITION, VELOCITY
AND ATTITUDE ERRORS
INS
KALMAN FILTER
GPS POSITION
AND VELOCITY
GPS
GPS RCVR
KALMAN FILTER
Figure 9 4. Closed Loop GPS/INS Aided Architecture
GPS aiding the INS (loosely coupled) in both open and closed loop modes results
in the simplest implementation: any GPS receiver and any INS with the necessary
data interfaces can be used and it requires a smaller Kalman mechanization of the
9 12
<< < GO > >>