f
u
=
contribution to deltarange caused by the frequency bias, to
be found
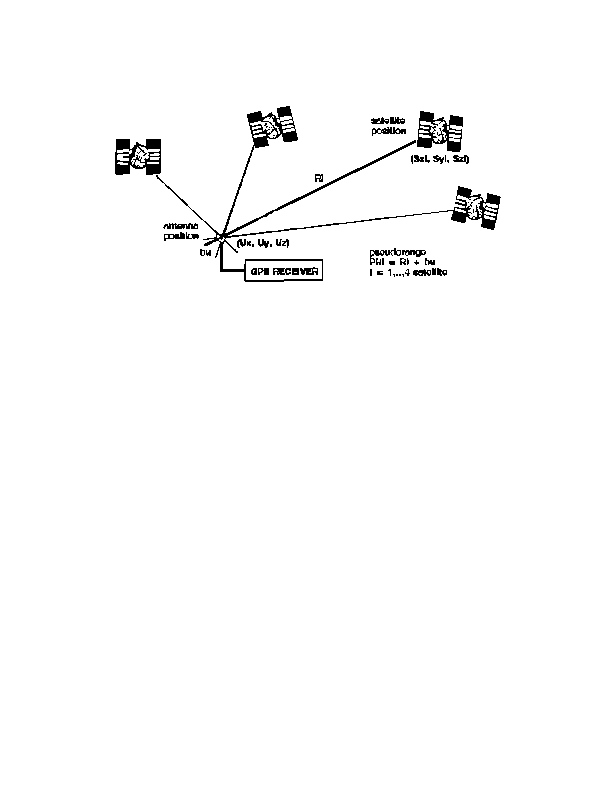
Figure 9 2. Geometry for GPS Measurement
Note that since the deltarange measurements are found by a scaled sum of VCO
commands from the carrier tracking loops, the average receiver and satellite
velocities over the deltarange dwell time should be used in the above equations
instead of instantaneous velocities. The average velocity can be approximated by
the velocity at the midpoint of the deltarange interval.
With four pseudorange measurements, there are four simultaneous quadratic
equations with four unknowns, the three coordinates of user position and the user s
receiver clock offset. Except in unusual geometric conditions, there exists a
solution. In practice, there are many computations to be made before arriving at
this equation. For example, the satellite positions are broadcast as orbital
parameters (ephemerides) and are a function of current time. In all, 24 variables
must be computed or solved from the available information.
9.3.3 The GPS Kalman Filter Model
To cast the Kalman filter equations in GPS form for the unaided receiver, the state
vector must be defined and the system dynamics and measurement m atrices must
be formulated. As a minimum, typically an eight state error vector is chosen:
position error (dx, dy, dz), receiver clock phase error (b
u
), velocity error (dv
x
, dv
y
,
dv
z
) and receiver clock frequency error (f
u
):
9 8
<< < GO > >>