measurements to correct its navigation solution. This implementation is more robust in
that it can continue to correct INS errors to some degree even when there are less than
four satellites being tracked. A major consideration to using tightly coupled integrations
with current systems is that the pseudoranges and deltaranges corrected for SA are
classified.
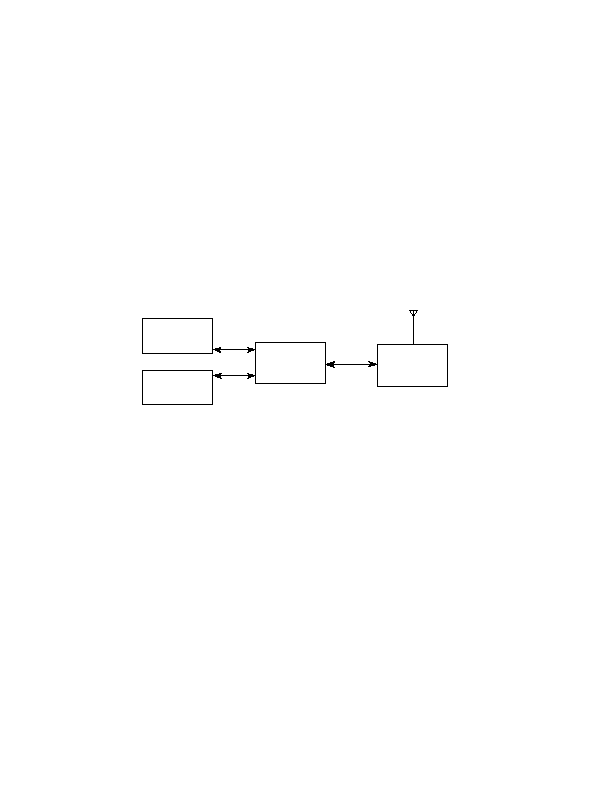
8.3.3 GPS and Mission Computer/Databus Emulator
The GPS configuration with mission computer/databus emulator (see Figure 8 3) is a
means to provide the equivalent of 1553 bus operation in a vehicle that does not have a
1553 bus. It uses the mission computer (or sometimes a smart CDU) to emulate the ARINC
575 or 429 interface to GPS, as well as to control the interfaces to other navigation
sensors. The main penalty in comparison to a 1553 architecture is the limited data transfer
rate of the ARINC interfaces and the increased complexity of mission computer functions
required to support data formatting and transfer among the different sensors.
CDU OR MISSION
ANTENNA
COMPUTER
INS
ARINC 575
DATABUS
GPS
EMULATOR
RECEIVER
OR ARINC 429
OTHER
SYSTEMS
Figure 8 3. Configuration with Mission Computer/Databus Emulator
Examples of other systems to be integrated with GPS in this configuration are a doppler
radar (velocity) combined with an AHRS. An AHRS is similar to an INS except that only HV
attitude, attitude rates, heading and acceleration are available (no position). The quality of
its output information is lower than that of a conventional INS. However, an integrated
GPS/AHRS may become a direct replacement for a high quality INS. The estimated cost of
an integrated GPS/AHRS is less than one half that of a stand alone INS. Additionally,
yearly maintenance costs are expected to be one third that of an INS.
8.3.4 GPS in a 1553 Databus Configuration
A GPS receiver includes a highly evolved set of interfaces to external systems. One such
interface is the high speed databus MIL STD 1553 (see Figur e 8 4). The 1553 databus
may be used by high dynamic, high performance HVs to quickly transfer data between an
external system and the GPS receiver.
Although a GPS receiver usually can only receive and transmit a limited number of well
defined 1553 bus data blocks, the number of options is still large. Nevertheless, an
integration cannot change the data blocks input to or output from a given GPS on the 1553
<< < GO > >>