An atomic clock with a stability of 10
13
s/s will keep the GPS receiver within a 100 m
(95%) position error for several minutes.
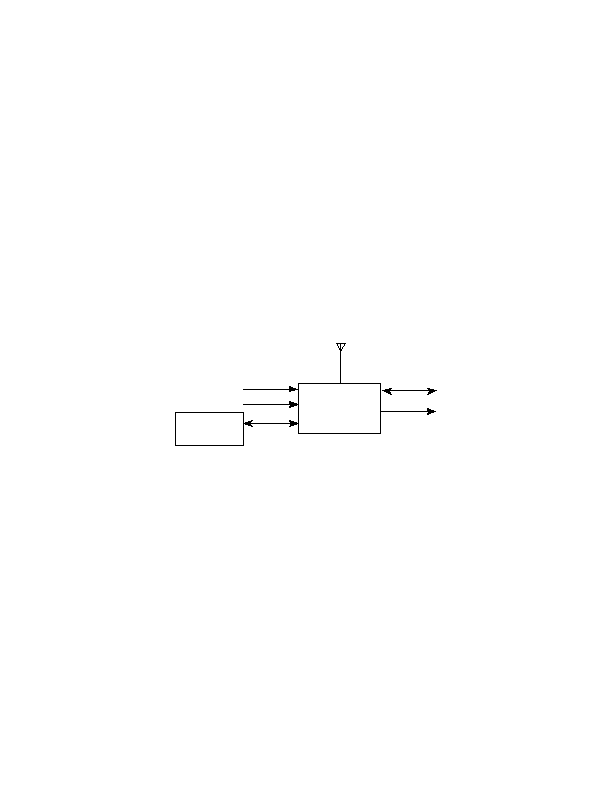
8.3.2 GPS/INS Integrations
The GPS INS aided configuration (see Figure 8 2) is useful for medium to high dynamics
applications. GPS receives INS sensor data from either a serial (e.g., ARINC 429) or
multiplex (e.g., MIL STD 1553) data port. Output is provided through the ARINC 461 and
429 databus port to the CDU and instruments. The GPS receiver may also provide
position and velocity data to the INS. For older INS s in particular, there may not be an
existing interface that will take data from a GPS receiver. This situation is often
encountered when retrofitting GPS to vehicles that have been in service for a number of
years. For integrating these systems with GPS, either the INS firmware must be modified to
accommodate GPS data, or the GPS receiver must accept the INS data, or the GPS/INS
integration must occur in a separate processor that accepts data from both the INS and
GPS. In the last two cases, the INS continues to run free inertial, open loop with no
feedback from the navigation processor if one is used.
ANTENNA
ARINC 461
ALTIMETER
CDU
CLOCK
ARINC 429
GPS
RECEIVER
INSTRUMENTS
ARINC 575
INS
OR ARINC 429
Figure 8 2. GPS INS aided Configuration
If the INS solution can be updated by GPS, and is taken as the system navigation solution,
it will have an accuracy similar to GPS whenever GPS is available. If the GPS data is used
to estimate the major error sources that affect INS position, then if GPS becomes
unavailable, the INS accuracy will degrade at a reduced rate when compared to the free
inertial INS position error growth rate. Baro metric altimeter and clock aiding may also be
available but is not necessary in the INS aided mode.
As discussed in paragraph 9.4.2.1, these are different levels of GPS/INS integration.
The simplest is referred to as "loosely coupled", where the GPS receiver processes
pseudorange and deltarange to produce geodetic position and velocity, which is then
used by the INS. In this case, the INS is unaffected by the satellite geometry implicit in
the GPS solution. However, if the receiver tracks less than four satellites, it may not be
able to produce a geodetic solution, causing the INS to lose aiding by the GPS. A
more complex GPS/INS integration is called "tightly coupled" where the INS uses
pseudorange and/or deltarange
<< < GO > >>