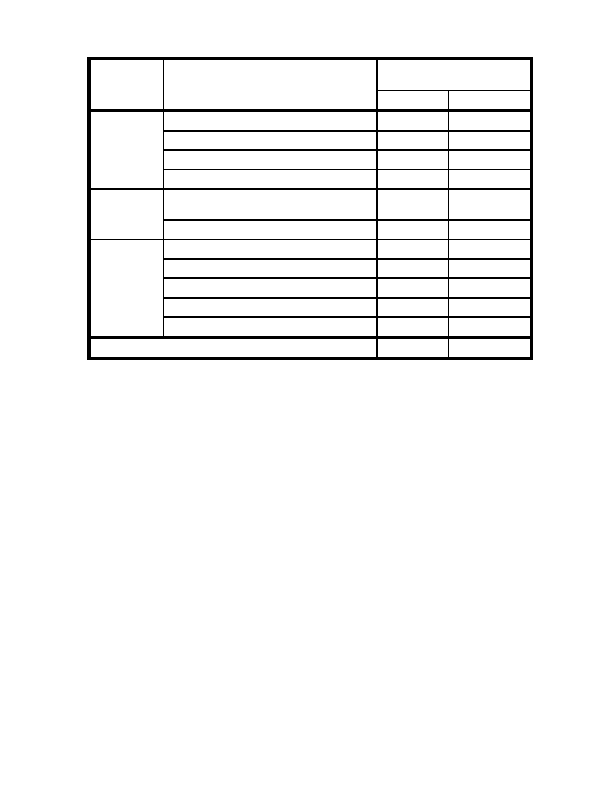
Table 3 1. GPS PPS System Range Error Budget
UERE Contribution
Segment
Error Source
(metres, 95%)
P Code
C/A Code
Space
Frequency Standard Stability
6.5
6.5
D Band Delay Variation
1.0
1.0
Space Vehicle Acceleration Uncertainty
2.0
2.0
Other
1.0
1.0
Ephemeris Prediction and Model
8.2
8.2
Control
Implementation
Other
1.8
1.8
User
Ionospheric Delay Compensation
4.5
9.8 19.6
Tropospheric Delay Compensation
3.9
3.9
Receiver Noise and Resolution
2.9
2.9
Multipath
2.4
2.4
Other
1.0
1.0
Total (RSS) System UERE (metres, 95%)
13.0
15.7 23.1
3.1.2.1 GPS UE Range Error Budget
The portion of the UERE allocated to the Space and Control segments is called the
user range error (URE) and is defined at the phase center of the satellite antenna.
The portion of the UERE allocated to the user equipment is called the UE error
(UEE). Specifically, the UERE is the root sum square of the URE and UEE. The
UEE includes residual errors after compensation for atmospheric delay, inherent
receiver errors of noise and resolution, and multipath. Modern C/A code receivers
have demonstrated significant improvements in ionospheric delay compensation
over the budgeted values. The values given for ionospheric delay compensation
error are based on dual frequency delay measurements for P code and the single
frequency ionospheric delay model for C/A code (as specified in "Technical
Characteristics of the Navstar GPS"). The budgeted values for C/A code can be
improved by use of a modified single frequency model or code less dual frequency
measurements on the L1 and L2 carriers. Modern P code and C/A code receivers
have both demonstrated significant improvements over the budgeted values for
receiver noise, resolution, and multipath, using digital phase locking techniques
and variable or narrow code correlation techniques.
3 3
<< < GO > >>