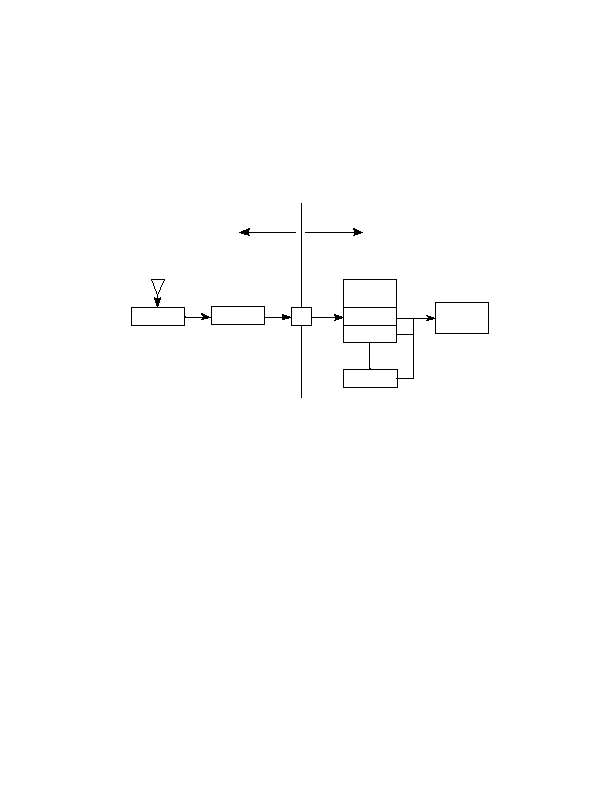
In a digital receiver, analog to digital (A/D) conversion takes place at the receiver
IF. Code correlation and further signal processing occurs digitally. Since the input
signals remain code division multiplexed throughout the front end, this portion of
the receiver can accommodate either a sequential or multiplexed tracking
configuration for any number of satellites. Thus a digital receiver can easily be
structured as an "all in view" receiver, whereas an analog equivalent would require
a dedicated hardware correlation channel for each satellite in view. The digital
architecture illustrated in Figure 2 2 also provides for a great reduction in
complexity of the analog portion of a receiver. This in turn results in lower
production costs for test, calibration, and maintenance.
ANALOG
DIGITAL
DIGITAL
SIGNAL
PROCESSOR
CONTROL
PRESELECTOR
DOWN
AND
GAIN
CONVERSION
A/D
CHANNEL 1
DATA
PROCESSOR
CHANNEL 2
CHANNEL n
Figure 2 2. Digital GPS Receiver Architecture
2.8 GPS AS A PSEUDORANGE/DELTA RANGE SENSOR
A GPS receiver need not necessarily be used as a PVT sensor in an integrated
navigation system. An integrator may instead wish to use GPS to supply satellite
pseudorange and deltarange measurements to an inte grated positioning solution.
Additional measurements may be provided to the integrated solution by systems or
equipment such as an Inertial Navigation System (INS) (position, velocity,
acceleration, attitude), Doppler Navigation System (position, velocity), Inertial
Aircraft Heading Reference System (velocity, acceleration, attitude), or a Central
Air Data Computer (CADC) (baro altitude and airspeed). The positioning processor
can combine all the measurement data into one Kalman filter, to generate a system
positioning solution.
Such a solution requires a sophisticated integration scheme. In order to use the
pseudorange and deltarange data, additional information is needed such as
satellite ephemeris and GPS receiver clock biases. Accurate system and
subsystem clocks are needed to correct for differences between the time the
calculations are performed and the
2 8
<< < GO > >>