The Cartesian coordinate frame of reference used in GPS/GLONASS is called
Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coordinates
(in meters) to describe the location of a GPS user or satellite. The term "Earth-
Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass
center of gravity (determined through years of tracking satellite trajectories). The term
"Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they
rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines the
equatorial plane (Figure 1).
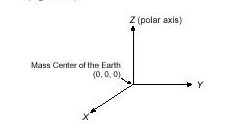
Figure 1 ECEF Coordinate Reference Frame
ECEF coordinates are expressed in a reference system that is related to mapping
representations. Because the earth has a complex shape, a simple, yet accurate,
method to approximate the earth's shape is required. The use of a reference ellipsoid
allows for the conversion of the ECEF coordinates to the more commonly used
geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic
coordinates can then be converted to a second map reference known as Mercator
Projections, where smaller regions are projected onto a flat mapping surface (that is,
Universal Transverse Mercator UTM or the USGS Grid system).
A reference ellipsoid can be described by a series of parameters that define its
shape and which include a semi-major axis (a), a semi-minor axis (b) and its first
eccentricity (e 2) and its second eccentricity (e '2) as shown in Figure 2. Depending on
the formulation used, ellipsoid "flattening" may be required.
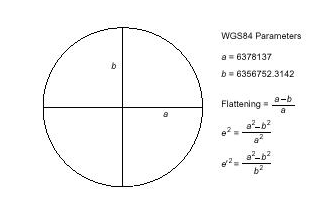
Figure 2 Ellipsoid Parameters
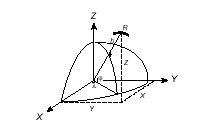
For global applications, the geodetic reference (datum) used for GPS is the World
Geodetic System 1984 (WGS84). This ellipsoid has its origin coincident with the
ECEF origin. The X-axis pierces the Greenwich meridian (where longitude = 0
degrees) and the XY plane make up the equatorial plane (latitude = 0 degrees).
Altitude is described as the perpendicular distance above the ellipsoid surface (which
not to be confused with the mean sea level datum).
Figure 3 ECEF and Reference Ellipsoid
LLA to ECEF
The conversion between the two reference coordinate systems can be performed
using closed formulas (although iteration methods also exist). The conversion from
LLA to ECEF (in meters) is shown below.
X = [N + H] cos ¢. cos £ (1)
Y = [N + H] cos ¢. sin £ (2)
Z = [(b 2 /a 2) N + h] sin ¢. (3)
Where:
¢ = latitude
£= longitude
h = height above ellipsoid (meters)
N = Prime Vertical of Curvature (meters) is defined as:
a 2
N = ____________________ (4)
[a 2 cos 2 ¢. + b 2 sin 2 £ ] 1/2
ECEF to LLA
The conversion between XYZ and LLA is slightly more involved but can be
achieved using the following closed formula set:
¢ = arctan [ _________________ ] (5)
£ = arctan [ ____ ] (6)
X
h = [ P
_______ ] N (7)
Cos ¢
Where auxiliary values are:
¥ = arctan [ _____ ] (8)
p b
p = [X 2 +Y 2 ] 1/2 (9)
GPS Heights
The height determined by GPS measurements relates to the perpendicular distance
above the reference ellipsoid and should not be confused with the more well-known
height datum Mean Sea Level (MSL). The datum that defines the MSL (also called
the geoid) is a complex surface that requires dense and accurate gravity data to define
its shape. The WGS84 ellipsoid approximates the geoid on a worldwide basis with
deviations between the two datums never exceeding 100 meters. The transformation
between the two surfaces is illustrated in Figure 4.
Figure 4 Ellipsoid and MSL Reference Datums
p e 2 a cos 3 ¥
Z + e '2 b sin 3 ¥
Y
Z a
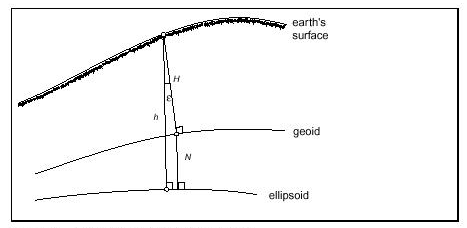
The conversion between the two reference datums is shown by:
h = H + N (10)
where:
h ellipsoidal height (Geodetic)
H orthometric height (MSL)
N geoid separation (undulation)
Note The ellipsoid/geoid separation ranges from a value of +100 meters to
100 meters.
Although the conversion between the different height datums is straightforward, the
accuracy at which the undulation is known (N) varies greatly with gravity
measurement data density. It is even more difficult to determine in mountainous
regions where mass distribution can vary rapidly.